AAA weekly
2020-02-03
Copyright FOURIN, Inc. 2026
High-accuracy Positioning Terminal Estimates Vehicle Position Within a Few Centimeters
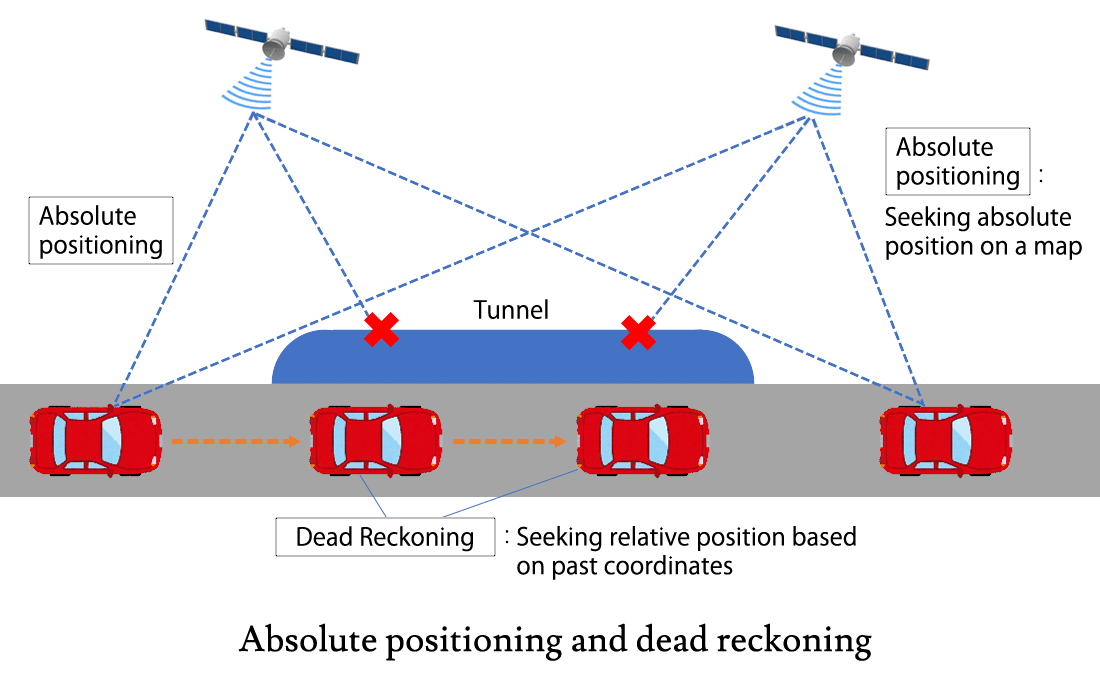
In order to realize a safe and seamless automatic driving system in any place, high-precision positioning for accurately determining the position of a vehicle on a road is required. In places such as tunnels and high-rise buildings, it is difficult to ascertain the position of the vehicle only by absolute positioning using a satellite positioning system. For this reason, the system uses dead reckoning, which finds a relative position based on a movement trajectory from a certain point in the past.
Germany’s Bosch is developing redundant vehicle position estimation technology. VMPS (Vehicle Motion and Position Sensor) integrates hardware and software, and combines absolute positioning and dead reckoning to calculate coordinates with sufficient accuracy necessary for autonomous driving. If a GNSS (Global Navigation Satellite System) signal cannot be received, the vehicle’s position is continuously determined by VMPS for a few seconds. If there is no signal for an extended period of time, location estimation is performed by Road Signature, which estimates the relative vehicle location based on a map. Bosch has also begun acquiring data in Japan to commercialize Road Signature. The company plans to complete high-precision 3D map data in 2020.
Mitsubishi Electric exhibited an autonomous driving test vehicle equipped with high-precision positioning technology at the Tokyo Motor Show in 2019. In November 2019, the company launched a cm-class high-accuracy positioning terminal that receives CLAS (Centimeter Level Augmentation Service) and other high-accuracy positioning augmentation information.
In Japan, cm-class positioning services by telecommunications carriers have also been launched one after another. In October 2019, NTT Docomo launched a location-based service for corporations using RTG (Real Time GIPSY) GNSS positioning using 1,300 electronic control points established by the Geospatial Information Authority of Japan. NTT Docomo also added several hundred of its own fixed locations. SoftBank also launched a similar high-precision positioning service at the end of November 2019. To improve positioning accuracy, SoftBank uses its own base stations to set up its own fixed stations at more than 3,300 locations nationwide. SoftBank will collaborate with SB Drive among others to demonstrate high-precision positioning for autonomous driving and drone control.
Overview of Vehicle Position Estimation Technology
Estimation of vehicle position for automatic driving system
・In order to realize a safe automatic driving system, high-precision positioning is required for vehicles to know the exact position on the road.
・Positioning technology is broadly divided into absolute positioning and dead reckoning.
– Absolute positioning identifies coordinates on a map. There are two types of absolute positioning, those that use satellites and those that use cameras and LiDAR based on maps.
– Dead reckoning identifies a relative position from past coordinates. There are two types of dead reckoning, an internal sensor type that uses both wheel speed and gyro, and an external sensor type that uses LiDAR or a camera.
・It is difficult to find the position with high accuracy by absolute positioning using a satellite in tunnels or near high-rise buildings. By combining absolute positioning and dead reckoning, it is possible to estimate the position of the vehicle for seamless autonomous driving.
GNSS / RNSS
・GNSS (Global Navigation Satellite System) is a general term for satellite positioning systems such as GPS, Galileo, GLONASS, and BeiDou. On the other hand, a satellite system that covers a specific area is called RNSS (Regional Navigation Satellite System), such as QZSS (Michibiki), a Quasi-Zenith Satellite System in Japan, and NavIC (formerly known as IRNSS) in India. (In the following text, "NSS also includes RNSS.)
・The operation status of satellites as of November 2019 is as follows.
– GPS (US): 30 in operation, 1 ceased operation.
– Galileo (Europe): 21 in operation, 3 ceased operation, 1 under inspection.
By 2020, a system is planned to be set up consisting of 24 units in operation and 6 spare units.
– GLONASS (Russia): 23 in operation, 2 under maintenance, 2 under inspection, 1 spare unit.
– Beidou (China): 34 in operation, 8 under inspection, 3 ceased operation.
– QZSS (Japan): 4 in operation.
– NavIC (India): 8 in operation.
In the next phase, the number of units in operation is planned to be increased to 11.
Positioning method using GNSS
・Single positioning: Information such as position and time transmitted from GNSS is received by one antenna. The position of the observation point is determined by simultaneously knowing the distances from four or more GNSSs to the observation point. The GNSSs whose positions are known are used as the reference points for movement.
・Relative positioning: The same GNSSs (4 or more) are observed at the same time, using two or more receivers. Based on the GNSS’ position, the relative positional relationship between the two points is determined.
・DGPS (DGNSS) positioning: D stands for differential. Using the reference station whose coordinates are known and the mobile station’s positioning target independent positioning is performed. Correction information (error from the base coordinates) generated by the reference station is transmitted to the mobile station. The coordinates of the mobile station are calculated based on the correction information. The margin of error is about several meters.
・RTK-GPS (GNSS) positioning: RTK stands for Real Time Kinematic. Similarly to DGPS positioning, positioning is performed by the reference station and the mobile station. Correction information generated by the reference station is transmitted to the mobile station to calculate the coordinates. The difference from DGPS positioning is that at the time of positioning, the distance to the satellite is determined from the wave number and phase difference of the carrier. The margin of error is about several centimeters.
・Network-type RTK-GPS (GNSS) positioning: Reference stations used for RTK-GPS positioning are not set up by corporate entities, but by the Geospatial Information Authority of Japan. About 1,300 electronic reference points are set up nationwide, covering the whole country at intervals of about 20 to 25 km. By correcting errors using real-time observation data of electronic control points, it is possible to measure long-distance baselines, which RTK-GPS is not good at, achieving the same positioning accuracy as RTK-GPS on short-range baseline.
Positioning reinforcement service
・CLAS (Centimeter Level Augmentation Service): A service that sends positioning augmentation information using QZSS. It can be used only in areas where electronic control points are installed. Positioning with an accuracy of about 10 cm is possible only with a receiver that can receive CLAS signals. Positioning satellites to be augmented are QZSS, GPS and Galileo.
・MADOCA (Multi-GNSS Advanced Demonstration tool for Orbit and Clock Analysis): A software developed by JAXA for estimating the precision satellite orbit and clock. It generates correction information required for high-accuracy positioning. It can be used outside Japan as well.
(Created based on documents of Geospatial Information Authority of Japan, and various media and other sources)
Mitsubishi Electric: Development of High-precision Positioning Technology
・In October 2019, at the Tokyo Motor Show, Mitsubishi Electric exhibited an autonomous driving demonstration vehicle xAUTO equipped with autonomous driving technology that enables driving on ordinary roads and unmanned parking without high-precision map information. Technologies installed in the xAUTO are as follows.
– It uses CLAS signals to acquire the position of the vehicle during travel, recording the route traveled in the past as a “local map” with a cm-level accuracy. By performing automatic driving control according to the local map, automatic driving can be realized even in places where high-precision map information is not available.
– Based on the operation plan, it generates the optimal driving route, acquiring vehicle position accurately from CLAS-based positioning outdoors and using cameras which detect landmarks of the parking lot indoors. By using automatic driving control along the driving route, automatic unmanned valet parking can be achieved indoors as well as outdoors.
– With sensor fusion technology that combines information from multiple sensors, such as millimeter-wave radars and cameras, it can quickly and accurately recognize the surrounding conditions.
・In November 2019, Mitsubishi Electric released a new cm-class high-accuracy positioning terminal AQLOC-Light that receives high-accuracy positioning augmentation information such as CLAS.
the development of receiving chips compatible with CLAS.
– Position information is interpolated by autonomous positioning using the gyro mounted on the receiver and the vehicle speed pulse signal from the moving object. Using this technology, positioning can be performed even in tunnels or under elevated structures where satellite signals cannot be received.
– When using CLAS (mobile mode), the horizontal position accuracy is 12cm and the vertical position accuracy is 24cm. When using network RTK, the horizontal position accuracy is 3cm, the vertical position accuracy is 6cm.
– Its dimensions are 90 × 90 × 30 (mm) and its weight is 280g. Compared to the company’s existing products, the number of parts was reduced and power consumption was lowered by 70%, eliminating the need for a heat exhaust structure. Volume and weight were reduced by about 80%.
(Created based on documents of Mitsubishi Electric, and various media and other sources)
Please
register or subscribe to view this report for free.
If you’re already a subscriber, sign in.
Credit card information is not needed for free trial registration.
You are eligible to view one report for free.
Additional reports require subscription.